探索城市与夜行野生动物之间的共生关系。
以墨尔本旗杆花园中的生活的负鼠为灵感,通过红外感应装置记录它们的行径路线,并以延迟 3–5 秒的光迹粒子效果重现,在地面生成动态拖尾。
项目结合案头研究、现场观察与多轮原型测试完成。通过编码实现红外传感器数据识别与 TouchDesigner 相连,生成延迟光迹与互动视觉效果。最终装置于室内呈现,配合视频模拟还原夜间公园的氛围,探讨数据与感知在重构人类与城市生态关系中的可能性。

粒子拖尾
当人或动物经过感应区域时,柔和的光带会在地面上延伸、流动

点阵排除
当人或动物经过感应区域时,发光的点阵会自动避开
延迟脚印
记录经过者的轨迹,并以细小的星点光标延迟几秒重现
为什么选择旗杆花园?
Flagstaff Gardens 位于墨尔本市中心西北角,是城市密集建筑中的一片安静绿岛。百年古树、起伏草地与城市天际线并置,形成了自然与都市之间独特的平衡。
场地的自然条件同样理想:地势较高、排水良好,植被以榆树、榕树与桉树为主,夜间活动的负鼠在此栖息频繁。
让隐形变得可见
白天,这里人们在这里游玩、穿行;到了夜晚,负鼠们便从树上爬下,沿着屋檐与枝叶的阴影穿行。
在我们与城市野生动物的关系中,往往只有冲突与忽视。我们看见它们留下的痕迹,却从未真正“看见”它们的生活轨迹。
装置所使用的红、橙、白色光线,是经过选择、对负鼠影响最小的光谱。以光为媒介,连接人类与夜行生物的共生轨迹

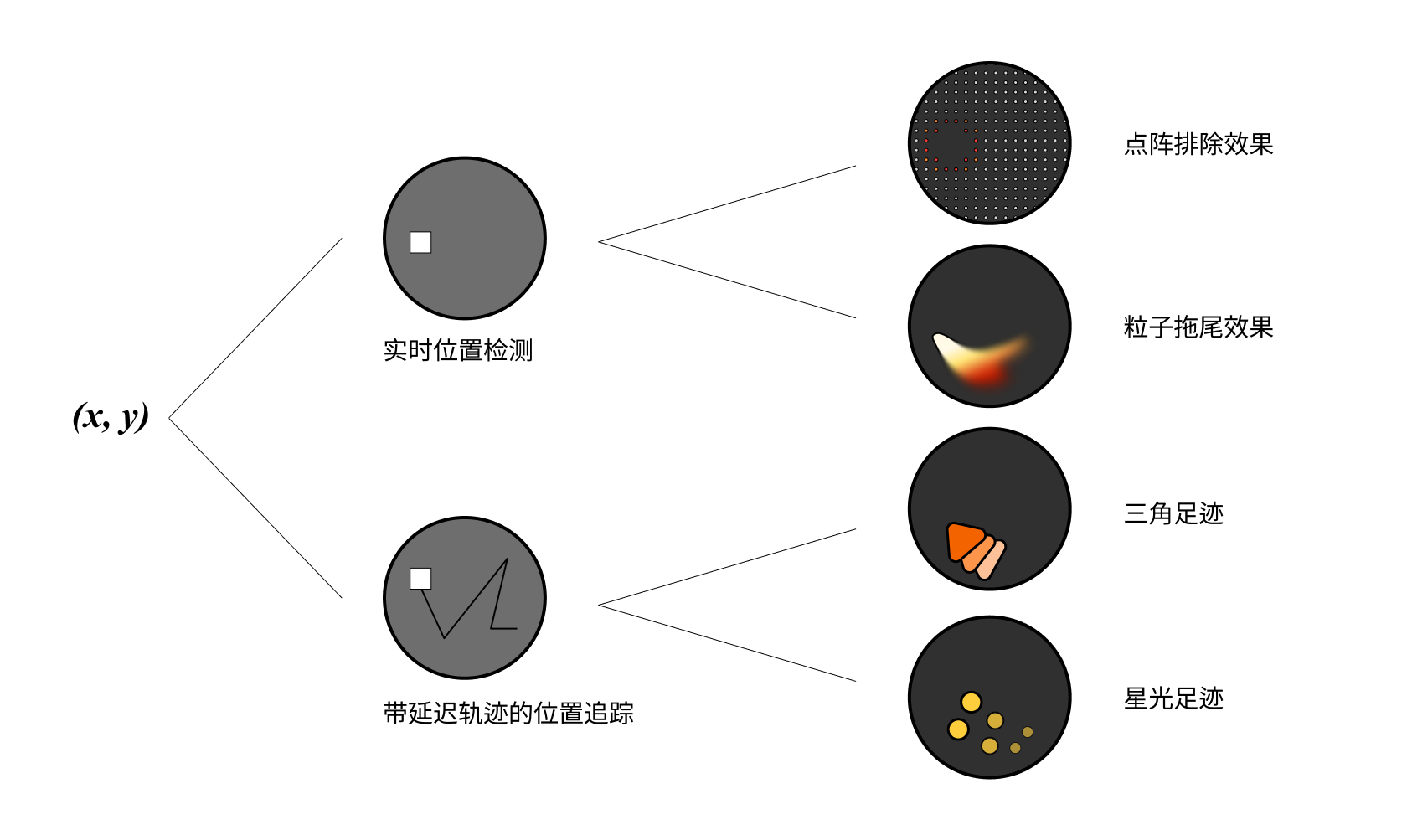
我们将交互逻辑分为两种模式:
第一种是实时交互模式,系统直接检测并响应实时位置数据(×,y);
第二种是延迟交互模式,系统先缓存检测到的位置数据,生成视频,其中方块表示被检测的点,再通过分析这些方块的位置来驱动后续运动,延迟约三秒。
项目介绍视频
原型测试视频


实地测量树木高度为 3.65 米,根据计算公式推算,其可投影面积约为 3.80 米 × 2.80 米。